Pentru întrebări despre produsele noastre sau lista de prețuri, vă rugăm să ne lăsați e-mailul și vă vom contacta în 24 de ore.


Acest sistem este compus din 4 stații de pompare, 4 dispozitive de ridicare a blocurilor tridimensionale, 4 seturi de dispozitive de control al vitezei de conversie a frecvenței, 16 seturi de grupuri de supape de control, 4 seturi de supape de echilibrare, 8 senzori de presiune de 70MPa, sisteme electronice de control și 12 seturi de senzori de deplasare etc.
Senzor de deplasare încorporat al cilindrului de ulei pentru a realiza reglarea poziționării orizontale de înaltă precizie
Sistemul poate fi echipat cu celule de sarcină opționale integrate în cilindru pentru a obține o cântărire de înaltă precizie
Cântărirea sarcinii de mare precizie și afișaj baricentric
Funcție de nivelare manuală / automată, funcționare sigură, simplă și convenabilă
Control de înaltă precizie (± 1,0 mm)
Reduceți riscul de deteriorare a curelei din cauza vibrațiilor atunci când macaraua pornește și se oprește brusc
Îmbunătățiți considerabil viteza de funcționare și siguranța operatorului
Dezvoltarea integrată a sistemului de control
Comutare gratuită manuală / automată, convenabilă pentru operarea pe teren
Control complet automat al deplasării și presiunii dublu în buclă închisă
Funcție de alarmă încorporată: alarmă de poziție în afara toleranței, alarmă de presiune peste limită, alarmă de nivel de ulei, alarmă de temperatură a uleiului etc.
Sistemul este echipat cu o interfață om-calculator, cu telecomandă opțională fără fir și funcționare locală
Stocarea în timp real a datelor de construcție pentru a obține trasabilitatea datelor
Afișare automată pe ecran a poziției centrului de greutate al sarcinii
| Model | Capacitatea sistemului (T) | Punct de nivelare | Cursa maximă de nivelare (mm) | Forța de tragere cu un singur cilindru (T) | Fluxul sistemului (L/Min) | Max. Presiune de lucru (MPa) |
| KET-PHD-240 | 240 | 4 | 1500 | 60 | 2 | 31.5 |
| KET-PHD-400 | 400 | 4 | 1500 | 100 | 4 | 31.5 |
| KET-PHD-800 | 800 | 4 | 1500 | 200 | 6 | 31.5 |
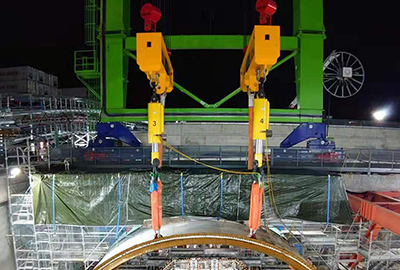
Ridicare sincronă și ajustare a atitudinii platformei de tunel pentru scut
 |  |  |
| Nume de fișier | Format | Limbă | Descărcați fișierul |
|---|